通信协议学习-NBloT
前言
参考文章/博主
NB-loT
硬件
【NB-IoT模组】
- 型号:
移远BC260Y-CN,链接:移远- 网络类型:支持中国移动、中国联通和中国电信的NB-IoT网络。电信 & 联通的NB-IoT卡由于限制多,故需要实际测试,不保证100%支持
- 通信速率:
Single Tone: 25.5 (DL)/16.7 (UL)Multi Tone: 25.5 (DL)/62.5 (UL),或者Max. 127(DL)/158.5(UL)- 支持的通信协议:
UDP/ TCP/ LwM2M/ MQTT/ SNTP/TLS/ SSL/ PPP/ HTTP/ HTTPS/CoAP- 耗流:
0.8μA @PSM
0.038mA @ 空闲模式 (eDRX=40.96s)
0.11mA @ 空闲模式 (DRX=2.56s)
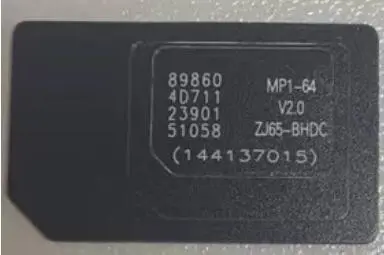
【物联网卡】
(1)默认配套:中国移动 NB-IoT上网卡
(2)300M/年,可用1年,满足测试需求开发板支持中国移动NB-IoT卡
NB-IoT卡属于物联网卡的一种,但NB-IoT卡≠物联网卡,故物联网卡并非都可用于本模块
中国电信 & 联通卡的NB-IoT卡由于限制条件多,故非100%支持
卡激活后,只能在所激活的省份内使用
NB-IoT卡一旦激活后,就不能拔出来插入其它设备,否则卡会锁定

【硬件】


简介
平常所讲的2G、3G、4G中的G其实是Generation的意思,例如2G是指第二代移动通信技术。每一代移动通信技术都有对应的网络制式:
- 中国移动:
- 2G -> GSM
- 3G -> TD-SCDMA
- 4G -> TD-LTE
- 中国联通:
- 2G -> GSM
- 3G -> WCDMA
- 4G -> TD-LTE、FDD-LTE
- 中国电信:
- 2G -> CDMA1X
- 3G -> CDMA2000
- 4G -> TD-LTE、FDD-LTE
WPAN
WPAN的全称是Low-rate wireless personal area network(低速无线个人区域网络),典型的代表有ZigBee、蓝牙等,其特点是低复杂度、低功耗、低速率、低成本LPWA
LPWA的全称是Low Power Wide Area(低速无线广域网),典型的代表有NB-IoT、eMTC、Lora和SigFox等,具有广覆盖、低功耗、低成本和大连接的特点
NB-IoT是基于LTE制式的一种移动通信技术,也就是说,它是4G技术的一种
下图是LTE制式通信技术的各个分支对比:
LTE Cat-NB即NB-IoT,是基于LTE网络制式而设计的一种
具有低功耗、低速率、上行通信时延低和下行通信时延较高(相对)特点的通信技术,满足对低功耗要求高但是对通信速率要求低的应用场景。上图中,我们还可以看到LTE Cat-M,它支持的通信速率比NB-IoT更高,可以应用于对通信速率要求更高的应用场景,应用场景:
- 环境温湿度、光照度、气体成分等信息的采集上报
- 火灾、煤气泄漏、水浸等环境异常状态监控与报警场景
- 外部设备状态信息采集与上报场景,例如远程抄表
NB-IoT的下行通信时延较高,约15秒左右(需要以实际测试为准),所以如果把NB-IoT用于下发指令或数据给终端设备,需要考虑这个时延问题。如需对下行通信速率有更快速的要求,可以采用eMTC或CATn等技术

模块常用指令测试
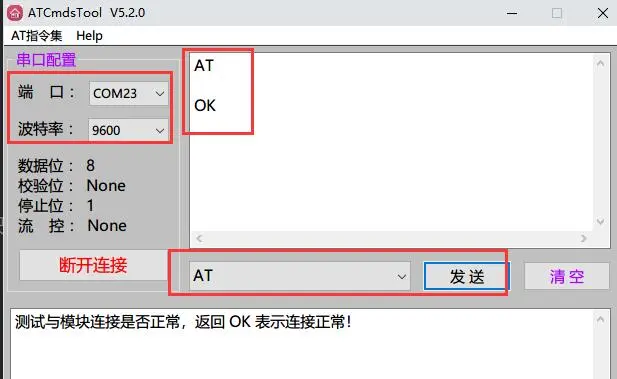
需要打开
ATCmdsTool V5.2.0软件,模块使用 USB转串口进行连接,4根线即可,3.3V供电
| AT指令 | 参数 | 返回值 | 作用 |
|---|---|---|---|
| AT+QSCLK= |
0 禁用休眠模式。 1 启用轻休眠(Light Sleep)和深休眠(Deep Sleep),并通过 PSM_EINT(下降沿)唤醒深休眠 2 仅启用轻休眠,并通过主串口唤醒 |
OK | 配置休眠模式 |
| ATI | / | Quectel_Ltd(模块制造商) Quectel_BC260Y-CN(模块型号) Revision: BC260YCNAAR02A02(制造商修订信息) |
读取模块完整信息 |
| AT+CGMM | / | Quectel_BC260Y-CN OK |
读取制造商模块号 |
| AT+CGMR | / | Revision: BC260YCNAAR02A02 OK |
读取制造商修订信息 |
| AT+CGSN= |
snt: 要读取产品的哪种序列号 0: 唯一码 1: 国际移动设备识别码 2: 国际移动设备识别码的软件版本号 3: 软件版本号 |
MP823G70607252204 OK |
读取模块唯一码 |
| 同上 | 同上 | +CGSN: 862745063975087 OK |
查询IMEI |
| 同上 | 同上 | +CGSN: 8627450639750802 OK |
查询识别码和软件版本号 |
| 同上 | 同上 | +CGSN: 02 OK |
查询软件版本号 |
| AT+CSCON? | 第二个返回数值代表状态,1:连接,0:空闲状态;如果没有数据交互,连接状态持续20秒,之后进入到空闲状态中,如果仍然没有数据交互,10秒后从空闲状态进入到PSM睡眠模式,这时候模块不再接收如何下行数据,模块只有在连接和空闲的状态下才能交互数据! | +CSCON: 0,0 OK |
读取信令连接状态 |
| AT+CEREG? | +CEREG: 1 - Registered, home network 其他数值 - 注册不成功 |
+CEREG: 0,1 OK |
读取网络注册状态 |
| AT+CGATT? | 0:没有附着 1:附着成功 |
+CGATT: 1 OK |
读取网络附着状态 |
| AT+CGPADDR? | / | +CGPADDR: 0,“100.67.249.195” OK |
读取设备IP地址 |
| AT+CSQ | 模块返回的第1个参数表示强度,越大表示信号越好 0: -113dBm 或更低1:``-111dBm <br>2~30: -109dBm~-53dBm`31:-51dBm 或更高 99:未知或无法检测 |
+CSQ: 8,0 OK |
读取信号强度 |
| AT+QBAND? | / | +QBAND: 5,8,3 OK |
查询模块的工作频段 |
| AT+QBAND=n | 根据NB-IoT所属的营运商选择对应的频段 3: 中国联通 5: 中国电信 8: 中国移动 |
OK | 设置模块的工作频段 |
| AT+CCLK? | +CCLK:[<yy/MM/dd,hh:mm:ss>[<±zz>]格式: 年月日, 时分秒, 时区 |
+CCLK: “2023/12/14,09:01:13+32” OK |
获取当前时间 |
| AT+QRST=1 | / | OK RDY +CFUN: 1 +CPIN: READY +IP: 100.85.29.214 |
重启模块 |
程序
结合上面,有上传和下发
- MX配置
串口2打开,中断打开,DMA中断不打开,DMA接收循环模式,注意要上拉!

- 程序编写
AllHead.h
#ifndef __ALLHEAD_H
#define __ALLHEAD_H
#include "main.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"
#include "CallBack.h"
#include "Public.h"
#include "System.h"
#include "System_Init.h"
#include "Task.h"
# include <string.h>
# include <stdarg.h>
# include <stdlib.h>
# include "stdio.h"
#include "stdint.h"
#include "math.h"
#include "bsp_4GCat_uart.h"
#include "bsp_4GCat.h"
#endifCallBack.c
/***************************************************************************
* File: CallBack.c
* Author: Luckys.
* Date: 2023/06/19
* description: store interrupt function
****************************************************************************/
#include "AllHead.h"
/* Public variables==========================================================*/
extern uint8_t ucUart1_Rec_Buff[128];
char AT_String[255];
extern const char *TOPIC_PROPERTY_SUB;
/*
* @function: HAL_TIM_PeriodElapsedCallback
* @param: None
* @retval: None
* @brief: timer callback function
*/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if (htim->Instance == htim6.Instance) // 1ms
{
static uint8_t cat_uart_rx = 0;
static uint16_t cat_reset_cnt = 0; // 模块复位所需时间计数
cat_uart_rx++;
if (cat_uart_rx >= 50) // 串口接收回传校验
{
cat_uart_rx = 0;
bsp_4GCat_uart.Bsp_4GCat_Uart_Handler();
}
if (bsp_4GCat.Reset_Status != RESET_OVER) // 复位计数
{
cat_reset_cnt++;
if (cat_reset_cnt >= BSP_4GCAT_RESET_TIME)
{
cat_reset_cnt = 0;
bsp_4GCat.Reset_Status = RESET_OVER; // 复位完成
}
}
System.Task_Marks_Handler();
}
}
void USART2_IRQHandler(void)
{
if(__HAL_UART_GET_FLAG(&huart2,UART_FLAG_IDLE) != 0x00u)
{
bsp_4GCat_uart.Bsp_4GCat_Uart_Data_Parse();
__HAL_UART_CLEAR_IDLEFLAG(&huart2);
}
HAL_UART_IRQHandler(&huart2);
}
void USART1_IRQHandler(void)
{
if(__HAL_UART_GET_FLAG(&huart1,UART_FLAG_IDLE) != 0x00u)
{
__HAL_UART_CLEAR_IDLEFLAG(&huart1);
HAL_UART_DMAStop(&huart1); // 串口停止DMA接收
if (strstr((char*)ucUart1_Rec_Buff, (char*)"MQTT_DISABLE") != NULL) // 断开MQTT连接
{
bsp_4GCat.bsp_4GCat_Step_Status = TASK_CIOT_MQTT_DISCONN; // 断开
}
if (strstr((char*)ucUart1_Rec_Buff, (char*)"GPS_GET") != NULL)
{
bsp_4GCat_uart.Bsp_4GCat_Uart_Send_String((const uint8_t *)"AT+CGPSINFO\r\n");
}
if (strstr((char*)ucUart1_Rec_Buff, (char*)"CLOSE_SUB") != NULL) // 退订
{
sprintf(AT_String, "AT+CMQTTUNSUB==0,%d,9\r\n", strlen(TOPIC_PROPERTY_SUB));
bsp_4GCat_uart.Bsp_4GCat_Uart_Send_String((const uint8_t *)AT_String);
}
if (strstr((char*)ucUart1_Rec_Buff, (char*)"CLOSE_SUB_Theme") != NULL) // 退订
{
bsp_4GCat_uart.Bsp_4GCat_Uart_Send_String((const uint8_t *)TOPIC_PROPERTY_SUB);
}
HAL_UART_Receive_DMA(&huart1, ucUart1_Rec_Buff, 128);
}
HAL_UART_IRQHandler(&huart1);
}System_Init.c
/***************************************************************************
* File: System_Init.c
* Author: Luckys.
* Date: 2023/06/23
* description: 存放系统初始化
****************************************************************************/
#include "AllHead.h"
/*====================================static function declaration area BEGIN====================================*/
static void Hardware_Init(void);
/*====================================static function declaration area END====================================*/
System_Init_t System_Init =
{
.Hardware_Init = &Hardware_Init
};
/* Public variables==========================================================*/
uint8_t ucUart1_Rec_Buff[128] = {0}; // 串口1接收缓存数组
/*
* @function: Hardware_Init
* @param: None
* @retval: None
* @brief: 硬件模块初始化
*/
static void Hardware_Init(void)
{
#if 1 // 串口1空闲中断+DMA
__HAL_UART_ENABLE_IT(&huart1, UART_IT_IDLE); // 使能串口空闲中断
HAL_UART_Receive_DMA(&huart1, ucUart1_Rec_Buff, 128);
#endif
bsp_4GCat_uart.Bsp_4GCat_Uart_Init(); // 模块串口初始化
printf("Hello\r\n");
HAL_TIM_Base_Start_IT(&htim6);
}Task.c
/***************************************************************************
* File: Task.c
* Author: Luckys.
* Date: 2023/06/23
* description:
****************************************************************************/
#include "AllHead.h"
/* Public variables==========================================================*/
extern const char *TOPIC_PROPERTY_SUB;
/*====================================static function declaration area BEGIN====================================*/
static void TasksHandle_200MS(void);
static void TasksHandle_1S(void);
static void TasksHandle_2S(void);
/*====================================static function declaration area END====================================*/
Task_t Task[] =
{
{FALSE, 200, 200, TasksHandle_200MS}, // task Period: 200ms
{FALSE, 1000, 1000, TasksHandle_1S}, // task Period: 1s
{FALSE, 2000, 2000, TasksHandle_2S}, // task Period: 2s
};
/*====================================variable definition declaration area BEGIN===================================*/
uint8_t ucTasks_Max = sizeof(Task) / sizeof(Task[0]);
/*====================================variable definition declaration area END===================================*/
static inline void TasksHandle_200MS(void)
{
bsp_4GCat.bsp_4GCat_Running();
bsp_4GCat.bsp_4GCat_Sub_Theme(TOPIC_PROPERTY_SUB);
}
static inline void TasksHandle_1S(void)
{
bsp_4GCat.bsp_4GCat_Data_Upload_1();
}
static inline void TasksHandle_2S(void)
{
bsp_4GCat.bsp_4GCat_GPS_Handler();
}bsp_4GCat.h
#ifndef __BSP_4GCAT_H
#define __BSP_4GCAT_H
// 使用调试打印(可以打印发送与接收回传数据到上位机串口助手)
#define USE_Debug_Print 0
// 使用正常打印
#define USE_Normal_Print 1
// 模块复位完成所需时间(大概10s)
#define BSP_4GCAT_RESET_TIME (uint16_t)10000
// 等待回传的计数值(测试发现大概正常情况下收到回传是330000左右,所以需要设置比它大几倍即可)
#define BSP_4GCAT_WAIT_COUNT 2000000
// 全自动模式(断开连接后自动重新复位连接)
#define BSP_4GCAT_AUTO_CONNNECT_MODE 1
/* CAT1模块工作步骤列表 */
typedef enum
{
TASK_CIOT_AT_TEST = 0, // 【AT】测试模块是否正常
TASK_CIOT_AT_TEST_RSP,
TASK_CIOT_CLOSE_ECHO, // 【ATE0】关闭命令回显
TASK_CIOT_CLOSE_ECHO_RSP,
TASK_CIOT_CGATT, // 【AT+CGATT?】查询网络附着状态 0--未附着 1--已附着成功
TASK_CIOT_CGATT_RSP,
TASK_CIOT_CGREG, // 【AT+CGREG?】查询网络注册状态 0,1--已注册本地网络 0,5--已注册,但是处于漫游状态
TASK_CIOT_CGREG_RSP,
TASK_GPS_START, // 【AT+CGNSSPWR=1】 启动GPS
TASK_GPS_START_RSP,
TASK_CIOT_MQTT_START, // 【AT+CMQTTSTART】启动MQTT功能
TASK_CIOT_MQTT_START_RSP,
TASK_CIOT_MQTT_OPEN, // 【AT+CMQTTACCQ=0,[CLIENT_ID],0】打开MQTT连接,CLIENT_ID是上面定义的那个
TASK_CIOT_MQTT_OPEN_RSP,
TASK_CIOT_MQTT_CONNECT, // 【AT+CMQTTCONNECT=0,[DOMAIN],60,1,[USERNAME],[PASSWORD]】连接MQTT服务器
TASK_CIOT_MQTT_CONNECT_RSP,
TASK_CONNECT_SUCCESS, // 连接MQTT服务器成功(结束)
TASK_CIOT_MQTT_DISCONN, // 【AT+CMQTTDISC=0,120】断开MQTT连接
TASK_CIOT_MQTT_DISCONN_RSP,
TASK_CIOT_MQTT_CLOSE, // 【AT+CMQTTREL=0】释放MQTT相关的资源
TASK_CIOT_MQTT_CLOSE_RSP,
TASK_CIOT_MQTT_STOP, // 【AT+CMQTTSTOP】关闭MQTT功能
TASK_CIOT_MQTT_STOP_RSP,
TASK_CIOT_RESET, // 【AT+CRESET】 模块复位
TASK_CIOT_RESET_RSP,
TASK_IDLE, // 空闲状态(空转)
} bsp_4GCat_Mode_Steps_et;
// 返回状态枚举
typedef enum
{
RET_PASS = -1, // 成功
RET_FAIL = 0 // 失败
} bsp_4GCat_Return_Status_et;
// 复位状态枚举
typedef enum
{
RESET_NOT = 0, // 未复位
RESET_OVER = 1, // 复位完成
} bsp_4GCat_Reset_Status_et;
// 模块接收状态
typedef enum
{
Rec_Status_None = 0, // 不接收
Rec_Status_CheckCmd_Plan1 = 1, // 校验指令回传 --- "OK"
Rec_Status_CheckCmd_Plan2 = 2, // 校验指令回传 --- "+CGATT: 1"
Rec_Status_CheckCmd_Plan3 = 3, // 校验指令回传 --- "+CGREG: 0,1 / +CGREG: 0,5"
Rec_Status_CheckCmd_Plan4 = 4, // 校验指令回传 --- "+CMQTTCONNECT: 0,0"
Rec_Status_CheckCmd_Plan5 = 5, // 校验指令回传 --- ">"
Rec_Status_CheckCmd_Plan6 = 6, // 校验指令回传 --- "+CGNSSPWR:READY!"
Rec_Status_CheckCmd_Plan7 = 7, // GPS数据
Rec_Status_CheckCmd_Plan8 = 8, // 订阅主题成功 --- "+CMQTTSUB: 0,0"
Rec_Status_MAX = Rec_Status_CheckCmd_Plan8 + 1, // 枚举成员数量(当做数组的大小)
} bsp_4GCat_Rec_Status_et;
// GNSS信息结构体
typedef struct
{
float latitude; // 存储纬度信息
char NS; // 纬度方向(北纬或南纬)
float longitude; // 存储经度信息
char EW; // 经度方向(东经或西经)
#if 1 /* Ignores */
struct
{
uint16_t year; // 年份
uint8_t month; // 月份
uint8_t day; // 日期
uint8_t hour; // 小时
uint8_t minute; // 分钟
uint8_t second; // 秒
uint16_t millisecond; // 毫秒
} UTC; // 存储协调世界时(UTC)时间信息
#endif
float altitude; // 存储海拔信息
float speedOverGround; // 存储地面速度信息
} GNSSInfo_t;
typedef struct
{
uint8_t bsp_GPS_Relay_Flag; // GPS装备完成标志位
float Latitude; // 纬度
float Longitude; // 经度
} bsp_GPS_st;
typedef struct
{
uint8_t bsp_4GCat_Sub_Pass_Flag; // 订阅主题成功标志位
bsp_4GCat_Reset_Status_et Reset_Status; // 复位状态
uint8_t bsp_4GCat_MQTT_Connect_Flag; // 连接MQTT服务器标志位
int8_t bsp_4GCat_Ret_Status_buf[Rec_Status_MAX]; // 存储返回值数组
bsp_4GCat_Rec_Status_et bsp_4GCat_Rec_Status; // 模块接收状态
int16_t bsp_4GCat_Step_Status; // AT模块工作步骤标记状态
uint8_t bsp_4GCat_Pub_Buf[254]; // MQTT数据上报存储数组
uint8_t bsp_4GCat_Pub_Len; // MQTT数据上报长度
void (*bsp_4GCat_Running)(void); // 模块运行
void (*bsp_4GCat_Data_Upload_1)(void); // 数据上传1
int8_t (*bsp_4GCat_GPS_Get_Data)(uint8_t*); // 获取GPS数据
void (*bsp_4GCat_GPS_Handler)(void); // GPS处理函数
void (*bsp_4GCat_Sub_Theme)(const char*); // 订阅主题
void (*bsp_4GCat_Sub_Data_Analyze)(uint8_t *); // 订阅主题数据解析
} bsp_4GCat_st;
extern bsp_4GCat_st bsp_4GCat;
extern bsp_GPS_st bsp_GPS;
#endifbsp_4GCat.c
/***************************************************************************
* File: bsp_4GCat.c
* Author: Yang
* Date: 2023/12/06
* description:
-----------------------------------
通过使能宏【BSP_4GCAT_AUTO_CONNNECT_MODE】决定是否要复位后或者/断开MQTT后重新进行连接
如果开启了MQTT功能需要关闭后下一次才能正常进行连接到MQTT服务器,不能直接复位!!!!
-----------------------------------
****************************************************************************/
#include "AllHead.h"
/* Private variables=========================================================*/
/* 腾讯云MQTT服务器信息 */
// 域名与端口
static const char *DOMAIN = "tcp://J7X2YMW6IU.iotcloud.tencentdevices.com:1883";
// 客户端ID
static const char *CLIENT_ID = "J7X2YMW6IU";
// 用户名
static const char *USERNAME = "J7X2YMW6IUTH_Sensor_Test;12010126;0M3Y7;1992171084";
// 密码
static const char *PASSWORD = "a88fc461af8202b6933524ec9b5c9d2fac226a35cbc09b9d4150a1d00000406f;hmacsha256";
// 属性发布主题
static const char *TOPIC_PROPERTY_PUB = "$thing/up/property/J7X2YMW6IU/TH_Sensor_Test";
// 订阅MQTT主题
const char *TOPIC_PROPERTY_SUB = "$thing/down/property/J7X2YMW6IU/TH_Sensor_Test";
// 模块超时计数
int16_t bsp_4GCat_Timeout_Count;
// 模块AT指令字符串
char bsp_4GCat_AT_String[255];
/* Private function prototypes===============================================*/
static void bsp_4GCat_Running(void);
static void bsp_4GCat_Data_Upload_1(void);
static void bsp_4GCat_Ret_Check(int8_t ret_status);
static void bsp_4GCat_BeforeSending_Parameter_Init(bsp_4GCat_Rec_Status_et rec_status, uint8_t* str);
static void bsp_4GCat_Moduel_Reset(void);
static void bsp_4GCat_Upload_Data_To_Pub(const char* pub_string, const char* pub_data_string);
static void bsp_4GCat_Sub_Theme(const char* sub_string);
static void bsp_4GCat_Sub_Data_Analyze(uint8_t * rec_data);
static void bsp_4GCat_GPS_Handler(void);
static int8_t bsp_4GCat_GPS_Get_Data(uint8_t* data_Str);
static int8_t bsp_4GCat_GPS_Data_Analyze(const char *format, GNSSInfo_t *info);
/* Public variables==========================================================*/
bsp_GPS_st bsp_GPS =
{
.bsp_GPS_Relay_Flag = FALSE,
.Latitude = 0.0,
.Longitude = 0.0
};
bsp_4GCat_st bsp_4GCat =
{
.bsp_4GCat_Sub_Pass_Flag = FALSE,
.Reset_Status = RESET_NOT,
.bsp_4GCat_MQTT_Connect_Flag = FALSE,
.bsp_4GCat_Ret_Status_buf = {RET_FAIL},
.bsp_4GCat_Rec_Status = Rec_Status_None,
.bsp_4GCat_Step_Status = TASK_CIOT_AT_TEST,
.bsp_4GCat_Pub_Buf = {0},
.bsp_4GCat_Pub_Len = 0,
.bsp_4GCat_Running = &bsp_4GCat_Running,
.bsp_4GCat_Data_Upload_1 = &bsp_4GCat_Data_Upload_1,
.bsp_4GCat_GPS_Get_Data = &bsp_4GCat_GPS_Get_Data,
.bsp_4GCat_GPS_Handler = &bsp_4GCat_GPS_Handler,
.bsp_4GCat_Sub_Theme = &bsp_4GCat_Sub_Theme,
.bsp_4GCat_Sub_Data_Analyze = &bsp_4GCat_Sub_Data_Analyze
};
/*=========================================== 应用层函数 ===========================================*/
/*
* @function: bsp_4GCat_Running
* @param: None
* @retval: None
* @brief: 模块运行
*/
static void bsp_4GCat_Running(void)
{
// 未复位成功则退出
if (bsp_4GCat.Reset_Status != RESET_OVER)
{
return;
}
switch (bsp_4GCat.bsp_4GCat_Step_Status)
{
case TASK_CIOT_AT_TEST: // 【发送AT测试是否正常】
{
/*状态复位*/
bsp_4GCat_BeforeSending_Parameter_Init(Rec_Status_CheckCmd_Plan1, (uint8_t *)"AT\r\n");
break;
}
case TASK_CIOT_AT_TEST_RSP: // 【判断回传--- "OK"】
{
bsp_4GCat_Ret_Check(bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan1]);
break;
}
case TASK_CIOT_CLOSE_ECHO: // 【关闭命令回显】
{
/*状态复位*/
bsp_4GCat_BeforeSending_Parameter_Init(Rec_Status_CheckCmd_Plan1, (uint8_t *)"ATE0\r\n");
break;
}
case TASK_CIOT_CLOSE_ECHO_RSP: // 【判断回传--- "OK"】
{
bsp_4GCat_Ret_Check(bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan1]);
break;
}
case TASK_CIOT_CGATT: // 【查询网络附着状态】
{
/*状态复位*/
bsp_4GCat_BeforeSending_Parameter_Init(Rec_Status_CheckCmd_Plan2, (uint8_t *)"AT+CGATT?\r\n");
break;
}
case TASK_CIOT_CGATT_RSP: // 【判断回传--- "+CGATT: 1"】
{
bsp_4GCat_Ret_Check(bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan2]);
break;
}
case TASK_CIOT_CGREG: // 【查询网络注册状态】
{
/*状态复位*/
bsp_4GCat_BeforeSending_Parameter_Init(Rec_Status_CheckCmd_Plan3, (uint8_t *)"AT+CGREG?\r\n");
break;
}
case TASK_CIOT_CGREG_RSP: // 【判断回传--- "+CGREG: 0,1"/"+CGREG: 0,5"】
{
bsp_4GCat_Ret_Check(bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan3]);
break;
}
case TASK_GPS_START: // 启动GPS
{
/*状态复位*/
bsp_4GCat_BeforeSending_Parameter_Init(Rec_Status_CheckCmd_Plan6, (uint8_t *)"AT+CGNSSPWR=1\r\n");
break;
}
case TASK_GPS_START_RSP: // 【判断回传--- "+CGNSSPWR:READY!",这里需要等久点大概10s,而且不能直接单片机复位,需要断电再上电或者模块复位才能有RELAY】
{
if (RET_PASS == bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan6])
{
bsp_GPS.bsp_GPS_Relay_Flag = TRUE;
bsp_4GCat.bsp_4GCat_Rec_Status = Rec_Status_None;
bsp_4GCat.bsp_4GCat_Step_Status++;
}
else
{
++bsp_4GCat_Timeout_Count;
if (bsp_4GCat_Timeout_Count >= 50)
{
#if USE_Normal_Print
printf("GPS OPEN ERROR\r\n");
#endif
bsp_GPS.bsp_GPS_Relay_Flag = FALSE;
bsp_4GCat.bsp_4GCat_Step_Status++; // 强制跳过
}
}
break;
}
case TASK_CIOT_MQTT_START: // 【启动MQTT】
{
/*状态复位*/
bsp_4GCat_BeforeSending_Parameter_Init(Rec_Status_CheckCmd_Plan1, (uint8_t *)"AT+CMQTTSTART\r\n");
break;
}
case TASK_CIOT_MQTT_START_RSP: // 【判断回传--- "OK"】
{
if (RET_PASS == bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan1])
{
bsp_4GCat.bsp_4GCat_Rec_Status = Rec_Status_None;
bsp_4GCat.bsp_4GCat_Step_Status++;
}
else
{
++bsp_4GCat_Timeout_Count;
if (bsp_4GCat_Timeout_Count >= 5)
{
bsp_4GCat_Timeout_Count = 0;
// 直接复位(重发不生效)
bsp_4GCat_Moduel_Reset(); // 复位
}
}
break;
}
case TASK_CIOT_MQTT_OPEN: // 【打开MQTT连接】
{
/*状态复位*/
Public.Memory_Clear((uint8_t*)bsp_4GCat_AT_String, strlen((char*)bsp_4GCat_AT_String)); // 清0
sprintf(bsp_4GCat_AT_String,"AT+CMQTTACCQ=0,\"%s\",0\r\n",CLIENT_ID);
bsp_4GCat_BeforeSending_Parameter_Init(Rec_Status_CheckCmd_Plan1, (uint8_t *)bsp_4GCat_AT_String);
break;
}
case TASK_CIOT_MQTT_OPEN_RSP: // 【判断回传--- "OK"】
{
bsp_4GCat_Ret_Check(bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan1]);
break;
}
case TASK_CIOT_MQTT_CONNECT: // 【连接MQTT服务器】
{
/*状态复位*/
Public.Memory_Clear((uint8_t*)bsp_4GCat_AT_String, strlen((char*)bsp_4GCat_AT_String)); // 清0
sprintf(bsp_4GCat_AT_String,"AT+CMQTTCONNECT=0,\"%s\",60,1,\"%s\",\"%s\"\r\n",DOMAIN,USERNAME,PASSWORD);
bsp_4GCat_BeforeSending_Parameter_Init(Rec_Status_CheckCmd_Plan4, (uint8_t *)bsp_4GCat_AT_String);
break;
}
case TASK_CIOT_MQTT_CONNECT_RSP: // 【判断回传--- "+CMQTTCONNECT: 0,0"】
{
if (RET_PASS == bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan4])
{
bsp_4GCat.bsp_4GCat_Rec_Status = Rec_Status_None;
bsp_4GCat.bsp_4GCat_Step_Status++;
}
else
{
++bsp_4GCat_Timeout_Count;
if (bsp_4GCat_Timeout_Count >= 5)
{
bsp_4GCat_Timeout_Count = 0;
// +(重发不生效)
bsp_4GCat_Moduel_Reset(); // 复位
}
}
}
case TASK_CONNECT_SUCCESS: // 连接MQTT服务器成功
{
bsp_4GCat.bsp_4GCat_MQTT_Connect_Flag = TRUE;
bsp_4GCat.bsp_4GCat_Step_Status = TASK_IDLE;
#if USE_Normal_Print
printf("MQTT CONNECT SUCCESS\r\n");
#endif
break;
}
case TASK_IDLE: // 空闲状态
{
break;
}
case TASK_CIOT_MQTT_DISCONN: // 【断开MQTT连接】
{
bsp_4GCat.bsp_4GCat_MQTT_Connect_Flag = FALSE;
bsp_4GCat.bsp_4GCat_Sub_Pass_Flag = FALSE;
bsp_4GCat_BeforeSending_Parameter_Init(Rec_Status_CheckCmd_Plan1, (uint8_t *)"AT+CMQTTDISC=0,120\r\n");
break;
}
case TASK_CIOT_MQTT_DISCONN_RSP: // 【判断回传---"OK"】
{
bsp_4GCat_Ret_Check(bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan1]);
break;
}
case TASK_CIOT_MQTT_CLOSE: // 【释放MQTT相关的资源】
{
bsp_4GCat_BeforeSending_Parameter_Init(Rec_Status_CheckCmd_Plan1, (uint8_t *)"AT+CMQTTREL=0\r\n");
break;
}
case TASK_CIOT_MQTT_CLOSE_RSP: // 【判断回传---"OK"】
{
bsp_4GCat_Ret_Check(bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan1]);
break;
}
case TASK_CIOT_MQTT_STOP: // 【关闭MQTT功能】
{
bsp_4GCat_BeforeSending_Parameter_Init(Rec_Status_CheckCmd_Plan1, (uint8_t *)"AT+CMQTTSTOP\r\n");
break;
}
case TASK_CIOT_MQTT_STOP_RSP: // 【判断回传---"OK"】
{
bsp_4GCat_Ret_Check(bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan1]);
break;
}
default:break;
}
}
/*
* @function: bsp_4GCat_Data_Upload_1
* @param: None
* @retval: None
* @brief: 数据上传1
*/
static void bsp_4GCat_Data_Upload_1(void)
{
static float a = 0,b = 0,c = 0,d = 0;
Public.Memory_Clear((uint8_t*)bsp_4GCat.bsp_4GCat_Pub_Buf, strlen((char*)bsp_4GCat.bsp_4GCat_Pub_Buf));
sprintf((char *)bsp_4GCat.bsp_4GCat_Pub_Buf, "{\"method\":\"report\",\"params\":{\"temp\":%.1f,\"humi\":%.1f,\"longitude\":%f,\"latitude\":%f}}", ++a, ++b, ++c, ++d);
bsp_4GCat_Upload_Data_To_Pub(TOPIC_PROPERTY_PUB, (char*)bsp_4GCat.bsp_4GCat_Pub_Buf);
}
/*=========================================== 中间层函数 ===========================================*/
/*
* @function: bsp_4GCat_Ret_Check
* @param: None
* @retval: None
* @brief: 回传结果检测
*/
static void bsp_4GCat_Ret_Check(int8_t ret_status)
{
if (RET_PASS == ret_status)
{
bsp_4GCat.bsp_4GCat_Rec_Status = Rec_Status_None;
bsp_4GCat.bsp_4GCat_Step_Status++;
}
else
{
++bsp_4GCat_Timeout_Count;
if (bsp_4GCat_Timeout_Count >= 8)
{
bsp_4GCat.bsp_4GCat_Step_Status--;
}
}
}
/*
* @function: bsp_4GCat_BeforeSending_Parameter_Init
* @param: None
* @retval: None
* @brief: 参数初始化且发送
*/
static void bsp_4GCat_BeforeSending_Parameter_Init(bsp_4GCat_Rec_Status_et rec_status, uint8_t* str)
{
/*状态复位*/
bsp_4GCat.bsp_4GCat_Rec_Status = rec_status;
bsp_4GCat.bsp_4GCat_Ret_Status_buf[rec_status] = RET_FAIL;
bsp_4GCat_Timeout_Count = 0;
bsp_4GCat_uart.Bsp_4GCat_Uart_Send_String((uint8_t *)str);
bsp_4GCat.bsp_4GCat_Step_Status++;
}
/*
* @function: bsp_4GCat_Moduel_Reset
* @param: None
* @retval: None
* @brief: 模块复位
*/
static void bsp_4GCat_Moduel_Reset(void)
{
bsp_4GCat.bsp_4GCat_MQTT_Connect_Flag = FALSE; // 标志位置0
bsp_4GCat.Reset_Status = RESET_NOT; // 未复位
bsp_4GCat.bsp_4GCat_Sub_Pass_Flag = FALSE; // 订阅主题完成标志位置0
bsp_4GCat_uart.Bsp_4GCat_Uart_Send_String((uint8_t *)"AT+CRESET\r\n");
#if BSP_4GCAT_AUTO_CONNNECT_MODE
bsp_4GCat.bsp_4GCat_Step_Status = TASK_CIOT_AT_TEST; // AT模式
#endif
#if USE_Normal_Print
printf("RESET...\r\n");
#endif
}
/*
* @function: bsp_4GCat_Upload_Data_To_Pub
* @param: pub_string -> 发送到的目的地主题 pub_data_string -> 要上传到主题的数据内容
* @retval: None
* @brief: 上传数据到MQTT主题
*/
static void bsp_4GCat_Upload_Data_To_Pub(const char* pub_string, const char* pub_data_string)
{
uint8_t step = 0; // 运行到哪步计数
uint32_t timeout = 0; // 重发超时时间计数
static uint16_t error_count = 0; // 错误计数(复位)
if (bsp_4GCat.bsp_4GCat_MQTT_Connect_Flag)
{
switch (step)
{
case 0: // 设置待发布的主题的字符串长度(回车后会出现一个尖括号)
{
timeout = 0;
bsp_4GCat.bsp_4GCat_Rec_Status = Rec_Status_CheckCmd_Plan5;
bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan5] = RET_FAIL;
Public.Memory_Clear((uint8_t*)bsp_4GCat_AT_String, strlen((char*)bsp_4GCat_AT_String)); // 清0
// 设置待发布的主题的字符串长度
sprintf(bsp_4GCat_AT_String, "AT+CMQTTTOPIC=0,%d\r\n", strlen(pub_string));
bsp_4GCat_uart.Bsp_4GCat_Uart_Send_String((uint8_t *)bsp_4GCat_AT_String);
step++;
}
case 1: // 判断">" 后输入主题(不能有回车),会返回 "OK"
{
// 超时等待
while (1)
{
if (RET_PASS == bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan5])
{
// 发送目的地主题
#if 0
printf("-----%d------\r\n",timeout);
#endif
error_count = 0;
timeout = 0;
bsp_4GCat.bsp_4GCat_Rec_Status = Rec_Status_CheckCmd_Plan1;
bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan1] = RET_FAIL;
bsp_4GCat_uart.Bsp_4GCat_Uart_Send_String((const uint8_t *)pub_string);
step++;
break; // 退出循环
}
timeout++;
if (timeout >= BSP_4GCAT_WAIT_COUNT)
{
error_count++;
goto error_handling;
}
}
}
case 2: // 发送完成判断回传 "OK" 再继续操作
{
while (1)
{
if (RET_PASS == bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan1])
{
timeout = 0;
bsp_4GCat.bsp_4GCat_Rec_Status = Rec_Status_None;
step++;
break;
}
timeout++;
if (timeout >= BSP_4GCAT_WAIT_COUNT)
{
error_count++;
goto error_handling;
}
}
}
case 3: // 设置要发送的数据长度(会出现一个尖括号)
{
timeout = 0;
bsp_4GCat.bsp_4GCat_Rec_Status = Rec_Status_CheckCmd_Plan5;
bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan5] = RET_FAIL;
Public.Memory_Clear((uint8_t*)bsp_4GCat_AT_String, strlen((char*)bsp_4GCat_AT_String)); // 清0
// 设置要发送的数据长度
sprintf(bsp_4GCat_AT_String, "AT+CMQTTPAYLOAD=0,%d\r\n", strlen(pub_data_string));
bsp_4GCat_uart.Bsp_4GCat_Uart_Send_String((uint8_t *)bsp_4GCat_AT_String);
step++;
}
case 4: // 判断 ">" 后将要发送的消息(不需要回车),会返回 "OK"
{
// 超时等待
while (1)
{
if (RET_PASS == bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan5])
{
// 发送目的地主题
error_count = 0;
timeout = 0;
bsp_4GCat.bsp_4GCat_Rec_Status = Rec_Status_CheckCmd_Plan1;
bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan1] = RET_FAIL;
bsp_4GCat_uart.Bsp_4GCat_Uart_Send_String((const uint8_t *)pub_data_string);
step++;
break; // 退出循环
}
timeout++;
if (timeout >= BSP_4GCAT_WAIT_COUNT)
{
error_count++;
goto error_handling;
}
}
}
case 5: // 发送完成判断回传 "OK" 再继续操作
{
while (1)
{
if (RET_PASS == bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan1])
{
timeout = 0;
bsp_4GCat.bsp_4GCat_Rec_Status = Rec_Status_None;
step++;
break;
}
timeout++;
if (timeout >= BSP_4GCAT_WAIT_COUNT)
{
error_count++;
goto error_handling;
}
}
}
case 6: // 发送数据到指定主题,会返回 "OK"
{
// 向指定的主题发布消息
bsp_4GCat_uart.Bsp_4GCat_Uart_Send_String((uint8_t *)"AT+CMQTTPUB=0,1,60\r\n");
break;
}
default:
break;
}
}
// 错误处理
error_handling:
{
if (error_count >= 10) // 长时间发送失败
{
error_count = 0;
bsp_4GCat_Moduel_Reset(); // 复位
}
return;
}
}
/*
* @function: bsp_4GCat_Sub_Theme
* @param: sub_string -> 待订阅的主题
* @retval: None
* @brief: 订阅主题
*/
static void bsp_4GCat_Sub_Theme(const char* sub_string)
{
uint8_t step = 0; // 运行到哪步计数
uint32_t timeout = 0; // 重发超时时间计数
static uint16_t error_count = 0; // 错误计数(复位)
if (bsp_4GCat.bsp_4GCat_MQTT_Connect_Flag)
{
if (FALSE == bsp_4GCat.bsp_4GCat_Sub_Pass_Flag) // 未订阅主题则进行订阅
{
switch (step)
{
case 0: // 配置订阅的主题(回车后会返回一个 ">")
{
/*状态复位*/
timeout = 0;
bsp_4GCat.bsp_4GCat_Rec_Status = Rec_Status_CheckCmd_Plan5;
bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan5] = RET_FAIL;
Public.Memory_Clear((uint8_t*)bsp_4GCat_AT_String, strlen((char*)bsp_4GCat_AT_String)); // 清0
sprintf(bsp_4GCat_AT_String, "AT+CMQTTSUBTOPIC=0,%d,1\r\n", strlen(sub_string));
bsp_4GCat_uart.Bsp_4GCat_Uart_Send_String((uint8_t *)bsp_4GCat_AT_String);
step++;
}
case 1: // 等待 ">" 然后发送需要订阅的主题
{
// 超时等待
while (1)
{
if (RET_PASS == bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan5])
{
error_count = 0;
timeout = 0;
bsp_4GCat.bsp_4GCat_Rec_Status = Rec_Status_CheckCmd_Plan1;
bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan1] = RET_FAIL;
bsp_4GCat_uart.Bsp_4GCat_Uart_Send_String((const uint8_t *)sub_string);
step++;
break; // 退出循环
}
timeout++;
if (timeout >= BSP_4GCAT_WAIT_COUNT)
{
timeout = 0;
error_count++;
goto error_handling;
}
}
}
case 2: // 返回 "OK"
{
while (1)
{
if (RET_PASS == bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan1])
{
timeout = 0;
bsp_4GCat.bsp_4GCat_Rec_Status = Rec_Status_None;
step++;
break;
}
timeout++;
if (timeout >= BSP_4GCAT_WAIT_COUNT)
{
timeout = 0;
error_count++;
goto error_handling;
}
}
}
case 3: // 订阅主题【返回"+CMQTTSUB: 0,0"】
{
bsp_4GCat.bsp_4GCat_Rec_Status = Rec_Status_CheckCmd_Plan8;
bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan8] = RET_FAIL;
bsp_4GCat_uart.Bsp_4GCat_Uart_Send_String((const uint8_t *)"AT+CMQTTSUB=0\r\n");
step++;
}
case 4: // 判断回传 "+CMQTTSUB: 0,0"
{
while (1)
{
if (RET_PASS == bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan8])
{
timeout = 0;
error_count = 0;
bsp_4GCat.bsp_4GCat_Sub_Pass_Flag = TRUE;
bsp_4GCat.bsp_4GCat_Rec_Status = Rec_Status_None;
break;
}
timeout++;
if (timeout >= BSP_4GCAT_WAIT_COUNT)
{
timeout = 0;
error_count++;
break;
}
}
break;
}
default:break;
}
}
}
error_handling:
{
if (error_count >= 10) // 长时间发送失败
{
error_count = 0;
bsp_4GCat_Moduel_Reset(); // 复位
}
return;
}
}
/*
* @function: bsp_4GCat_Sub_Data_Analyze
* @param: rec_data -> 接收的数据
* @retval: None
* @brief: 订阅主题的数据解析
*/
static void bsp_4GCat_Sub_Data_Analyze(uint8_t * rec_data)
{
if (FALSE == bsp_4GCat.bsp_4GCat_Sub_Pass_Flag)
{
return;
}
uint16_t len = 0;
len = sizeof((char *)rec_data); // 长度
uint8_t temp[len];
Public.Memory_Copy((char *)temp, (char *)rec_data, len); // 复制
// 数据判断
if (strstr((char *)rec_data, "\"switch_1\":1") != NULL)
{
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_0,GPIO_PIN_RESET);
}
if (strstr((char *)rec_data, "\"switch_1\":0") != NULL)
{
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_0,GPIO_PIN_SET);
}
}
/*=========================================== GPS相关函数 ===========================================*/
/*
* @function: bsp_4GCat_GPS_Handler
* @param: None
* @retval: None
* @brief: GPS处理函数
*/
static void bsp_4GCat_GPS_Handler(void)
{
uint8_t step = 0;
uint32_t timeout = 0; // 重发超时时间计数
static uint16_t error_count = 0; // 错误计数
if (FALSE == bsp_GPS.bsp_GPS_Relay_Flag) // GPS未准备则退出
{
return;
}
switch (step)
{
case 0: // 手动获取经纬度,会返回 经纬度数据和"OK"
{
timeout = 0;
bsp_4GCat.bsp_4GCat_Rec_Status = Rec_Status_CheckCmd_Plan7;
bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan7] = RET_FAIL;
bsp_4GCat_uart.Bsp_4GCat_Uart_Send_String((const uint8_t *)"AT+CGPSINFO\r\n");
step++;
}
case 1: // 提取经纬度数据
{
while (1)
{
if (RET_PASS == bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan7])
{
timeout = 0;
error_count = 0;
bsp_4GCat.bsp_4GCat_Rec_Status = Rec_Status_None;
break;
}
timeout++;
if (timeout >= BSP_4GCAT_WAIT_COUNT)
{
error_count++;
bsp_GPS.Latitude = 0;
bsp_GPS.Longitude = 0;
break;
}
}
break;
}
default:break;
}
// 错误处理---直接GPS准备完成标志位置0
if (error_count >= 10)
{
error_count = 0;
bsp_GPS.bsp_GPS_Relay_Flag = FALSE;
}
}
/*
* @function: bsp_4GCat_GPS_Get_Data
* @param: data_Str -> 接收数组
* @retval: 成功--RET_PASS 失败--RET_FAIL
* @brief: 获取GPS数据
*/
static int8_t bsp_4GCat_GPS_Get_Data(uint8_t* data_Str)
{
uint16_t len = 0;
GNSSInfo_t info;
len = strlen((char *)data_Str); // 长度
uint8_t temp[len];
Public.Memory_Copy((char *)temp, (char *)data_Str, len); // 复制
if (bsp_4GCat_GPS_Data_Analyze((char *)temp, &info) != RET_PASS)
{
return RET_FAIL;
}
float lat, lon;
float minutes;
lat = ((uint16_t)info.latitude) / 100;
minutes = info.latitude - lat * 100;
lat += minutes / 60;
lon = ((uint16_t)info.longitude) / 100;
minutes = info.longitude - lon * 100;
lon += minutes / 60;
if (info.NS == 'S')
{
lat = -lat;
}
if (info.EW == 'W')
{
lon = -lon;
}
// 获取经纬度
bsp_GPS.Latitude = lat;
bsp_GPS.Longitude = lon;
return RET_PASS;
}
/*
* @function: bsp_4GCat_GPS_Data_Analyze
* @param: None
* @retval: None
* @brief: 数据解析
*/
static int8_t bsp_4GCat_GPS_Data_Analyze(const char *format, GNSSInfo_t *info)
{
char *start = strstr(format, "+CGPSINFO: ");
if (NULL == start)
{
return RET_FAIL;
}
if (strlen(start) < 35)
{
return RET_FAIL;
}
start += 11; // Skip the header.
uint8_t flag = 0;
uint8_t finish = 0;
char value[24];
Public.Memory_Clear((uint8_t*)value, sizeof(value));
for (uint8_t counter = 0; *start != 0; start++)
{
if (*start == ',')
{
}
else if (*start == '\r')
{
finish = 1;
}
else
{
value[counter++] = *start;
continue;
}
switch (flag++)
{
case 0:
{
info->latitude = (float)atof(value);
break;
}
case 1:
{
info->NS = value[0];
break;
}
case 2:
{
info->longitude = (float)atof(value);
break;
}
case 3:
{
info->EW = value[0];
break;
}
case 4:
{
info->UTC.year = (uint16_t)atoi(&value[4]);
value[4] = 0;
info->UTC.month = (uint8_t)atoi(&value[2]);
value[2] = 0;
info->UTC.day = (uint8_t)atoi(&value[0]);
break;
}
case 5:
{
info->UTC.millisecond = (uint16_t)atoi(&value[7]);
value[6] = 0;
info->UTC.second = (uint8_t)atoi(&value[4]);
value[4] = 0;
info->UTC.minute = (uint8_t)atoi(&value[2]);
value[2] = 0;
info->UTC.hour = (uint8_t)atoi(&value[0]);
break;
}
case 6:
{
info->altitude = (float)atof(value);
break;
}
case 7:
{
info->speedOverGround = (float)atof(value);
break;
}
default:
{
finish = 1;
break;
}
}
if (finish)
{
break;
}
counter = 0;
Public.Memory_Clear((uint8_t*)value, sizeof(value));
}
return RET_PASS;
}bsp_4GCat_uart.h
#ifndef __BSP_4GCAT_UART_H
#define __BSP_4GCAT_UART_H
#include "AllHead.h"
// 模块使用的串口
#define BSP_4GCat_USE_Serial huart2
// 模块使用定时器
#define BSP_4GCat_USE_Timer htim7
// 串口接收最大长度
#define BSP_4GCat_Rec_MAX_LEN 168
typedef struct
{
uint8_t ucUart_Rec_Over_Flag; // 串口接收完成标志位
uint16_t usUart_Rec_Len; // 串口接收数据长度
uint8_t *pucRec_Buffer; // 接收缓存指针
void (*Bsp_4GCat_Uart_Init)(void); // 串口初始化
void (*Bsp_4GCat_Uart_Send_String)(const uint8_t *); // 串口发送字符串
void (*Bsp_4GCat_Uart_Data_Parse)(void); // 串口数据解析
void (*Bsp_4GCat_Uart_Handler)(void); // 串口处理函数
} bsp_4GCat_uart_st;
extern bsp_4GCat_uart_st bsp_4GCat_uart;
#endifbsp_4GCat_uart.c
/***************************************************************************
* File: bsp_4GCat_uart.c
* Author: Yang
* Date: 2023/12/06
* description:
-----------------------------------
串口接线:
PA2(TX) --- 模块RX
PA3(RX) --- 模块TX
GND --- GND
5V --- 5V
-----------------------------------
****************************************************************************/
#include "AllHead.h"
/* Private variables=========================================================*/
static uint8_t uc4GCat_Uart_Rec_Temp_Arr[BSP_4GCat_Rec_MAX_LEN]; // 串口接收临时缓存数组
static uint8_t uc4GCat_Uart_Rec_Arr[BSP_4GCat_Rec_MAX_LEN]; // 模块串口接收数组
/* Private function prototypes===============================================*/
static void Bsp_4GCat_Uart_Init(void);
static void Bsp_4GCat_Uart_Send_String(const uint8_t *pStr);
static void Bsp_4GCat_Uart_Data_Parse(void);
static void Bsp_4GCat_Uart_Handler(void);
/* Public variables==========================================================*/
bsp_4GCat_uart_st bsp_4GCat_uart =
{
.ucUart_Rec_Over_Flag = FALSE,
.usUart_Rec_Len = 0,
.pucRec_Buffer = uc4GCat_Uart_Rec_Arr,
.Bsp_4GCat_Uart_Init = &Bsp_4GCat_Uart_Init,
.Bsp_4GCat_Uart_Send_String = &Bsp_4GCat_Uart_Send_String,
.Bsp_4GCat_Uart_Data_Parse = &Bsp_4GCat_Uart_Data_Parse,
.Bsp_4GCat_Uart_Handler = &Bsp_4GCat_Uart_Handler
};
/*
* @function: Bsp_4GCat_Uart_Init
* @param: None
* @retval: None
* @brief: 串口初始化
*/
static void Bsp_4GCat_Uart_Init(void)
{
__HAL_UART_ENABLE_IT(&BSP_4GCat_USE_Serial, UART_IT_IDLE); // 使能串口空闲中断
HAL_UART_Receive_DMA(&BSP_4GCat_USE_Serial, uc4GCat_Uart_Rec_Temp_Arr, (uint16_t)BSP_4GCat_Rec_MAX_LEN); // 接收清0
}
/*
* @function: Bsp_4GCat_Uart_Send_String
* @param: None
* @retval: None
* @brief: 串口发送字符串
*/
static void Bsp_4GCat_Uart_Send_String(const uint8_t *pStr)
{
HAL_UART_Transmit(&BSP_4GCat_USE_Serial, pStr, strlen((const char *)pStr), 5000);
#if USE_Debug_Print
HAL_UART_Transmit(&huart1, pStr, strlen((const char *)pStr), 5000);
#endif
}
/*
* @function: Bsp_4GCat_Uart_Data_Parse
* @param: None
* @retval: None
* @brief: 串口接收数据解析
*/
static void Bsp_4GCat_Uart_Data_Parse(void)
{
HAL_UART_DMAStop(&BSP_4GCat_USE_Serial); // 串口停止DMA接收
bsp_4GCat_uart.usUart_Rec_Len = BSP_4GCat_Rec_MAX_LEN - __HAL_DMA_GET_COUNTER(&hdma_usart2_rx);
Public.Memory_Copy((char*)bsp_4GCat_uart.pucRec_Buffer, (char*)uc4GCat_Uart_Rec_Temp_Arr, bsp_4GCat_uart.usUart_Rec_Len);
bsp_4GCat_uart.ucUart_Rec_Over_Flag = TRUE;
}
/*
* @function: Bsp_4GCat_Uart_Handler
* @param: None
* @retval: None
* @brief: 串口接收处理函数
*/
static void Bsp_4GCat_Uart_Handler(void)
{
if (bsp_4GCat_uart.ucUart_Rec_Over_Flag)
{
switch (bsp_4GCat.bsp_4GCat_Rec_Status)
{
case Rec_Status_None:
{
break;
}
case Rec_Status_CheckCmd_Plan1:
{
if (strstr((char*)bsp_4GCat_uart.pucRec_Buffer, (char*)"OK") != NULL)
{
bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan1] = RET_PASS;
}
else
{
bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan1] = RET_FAIL;
}
break;
}
case Rec_Status_CheckCmd_Plan2:
{
if (strstr((char*)bsp_4GCat_uart.pucRec_Buffer, (char*)"+CGATT: 1") != NULL)
{
bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan2] = RET_PASS;
}
else
{
bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan2] = RET_FAIL;
}
break;
}
case Rec_Status_CheckCmd_Plan3:
{
if (strstr((char*)bsp_4GCat_uart.pucRec_Buffer, (char*)"+CGREG: 0,1") != NULL)
{
bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan3] = RET_PASS;
}
else if (strstr((char*)bsp_4GCat_uart.pucRec_Buffer, (char*)"+CGREG: 0,5") != NULL)
{
bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan3] = RET_PASS;
}
else
{
bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan3] = RET_FAIL;
}
break;
}
case Rec_Status_CheckCmd_Plan4:
{
if (strstr((char*)bsp_4GCat_uart.pucRec_Buffer, (char*)"+CMQTTCONNECT: 0,0") != NULL)
{
bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan4] = RET_PASS;
}
else
{
bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan4] = RET_FAIL;
}
break;
}
case Rec_Status_CheckCmd_Plan5:
{
if (strstr((char*)bsp_4GCat_uart.pucRec_Buffer, (char*)">") != NULL)
{
bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan5] = RET_PASS;
}
else
{
bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan5] = RET_FAIL;
}
break;
}
case Rec_Status_CheckCmd_Plan6:
{
if (strstr((char*)bsp_4GCat_uart.pucRec_Buffer, (char*)"READY") != NULL)
{
bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan6] = RET_PASS;
}
else
{
bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan6] = RET_FAIL;
}
break;
}
case Rec_Status_CheckCmd_Plan7:
{
bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan7] = bsp_4GCat.bsp_4GCat_GPS_Get_Data(bsp_4GCat_uart.pucRec_Buffer);
break;
}
case Rec_Status_CheckCmd_Plan8:
{
if (strstr((char*)bsp_4GCat_uart.pucRec_Buffer, (char*)"+CMQTTSUB: 0,0") != NULL)
{
bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan8] = RET_PASS;
}
else
{
bsp_4GCat.bsp_4GCat_Ret_Status_buf[Rec_Status_CheckCmd_Plan8] = RET_FAIL;
}
break;
}
default:break;
}
// 订阅主题发送过来的数据解析
bsp_4GCat.bsp_4GCat_Sub_Data_Analyze(bsp_4GCat_uart.pucRec_Buffer);
bsp_4GCat_uart.ucUart_Rec_Over_Flag = FALSE;
#if USE_Debug_Print
printf("%s\r\n",bsp_4GCat_uart.pucRec_Buffer);
#endif
Public.Memory_Clear(bsp_4GCat_uart.pucRec_Buffer,bsp_4GCat_uart.usUart_Rec_Len);
bsp_4GCat_uart.usUart_Rec_Len = 0;
HAL_UART_Receive_DMA(&BSP_4GCat_USE_Serial, uc4GCat_Uart_Rec_Temp_Arr, (uint16_t)BSP_4GCat_Rec_MAX_LEN);
}
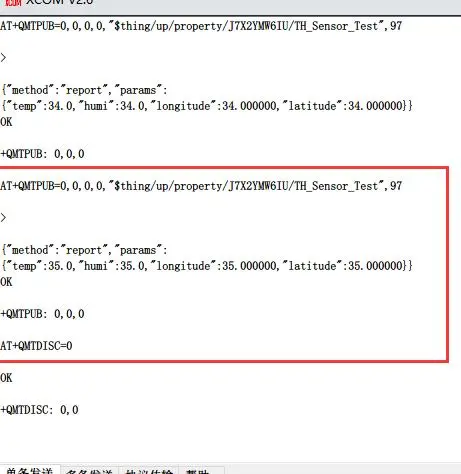
}- 实验现象
正常
使用UDP与私有服务器通信
PuTTY登陆的话还是跟4G一样,使用那个IP,用户名,密码
使用移远串口调试助手
- 打开串口助手
- 登陆远程服务器
登陆后输入指令进入UDP服务
./udpserver- 串口助手输入指令

AT // 测试
# OK
AT+QSCLK=0 // 禁止模块休眠
# OK
AT+QIOPEN=0,0,"UDP","1.15.27.206",12301 // 创建UDP链接
# OK
# +QIOPEN: 0,0
AT+QISEND=0,13 // 配置待发送数据的长度,会出现一个>
# >
{"value":123} // 输入数据(没有回车换行)
# OK
# SEND OK
AT+QICLOSE=0 // 关闭连接
# OK
# CLOSE OK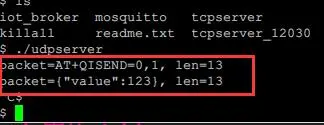
使用TCP与私有服务器通信
- 登陆远程服务器
登陆后输入指令进入TCP服务
./tcpserver- 串口助手输入指令
AT // 测试
# OK
AT+QSCLK=0 // 禁止模块休眠
# OK
AT+QIOPEN=0,0,"TCP","1.15.27.206",12300 // 创建TCP链接
# OK
# +QIOPEN: 0,0
AT+QISEND=0,13 // 配置待发送数据的长度,会出现一个>
# >
{"value":123} // 输入数据(没有回车换行)
# OK
# SEND OK
AT+QICLOSE=0 // 关闭连接
# OK
# CLOSE OK
使用MQTT与私有云服务器通信
- 启动MQTT服务,puTTY输入:
./killall
./mosquitto -v- 使用MQTT.fx连接云服务器
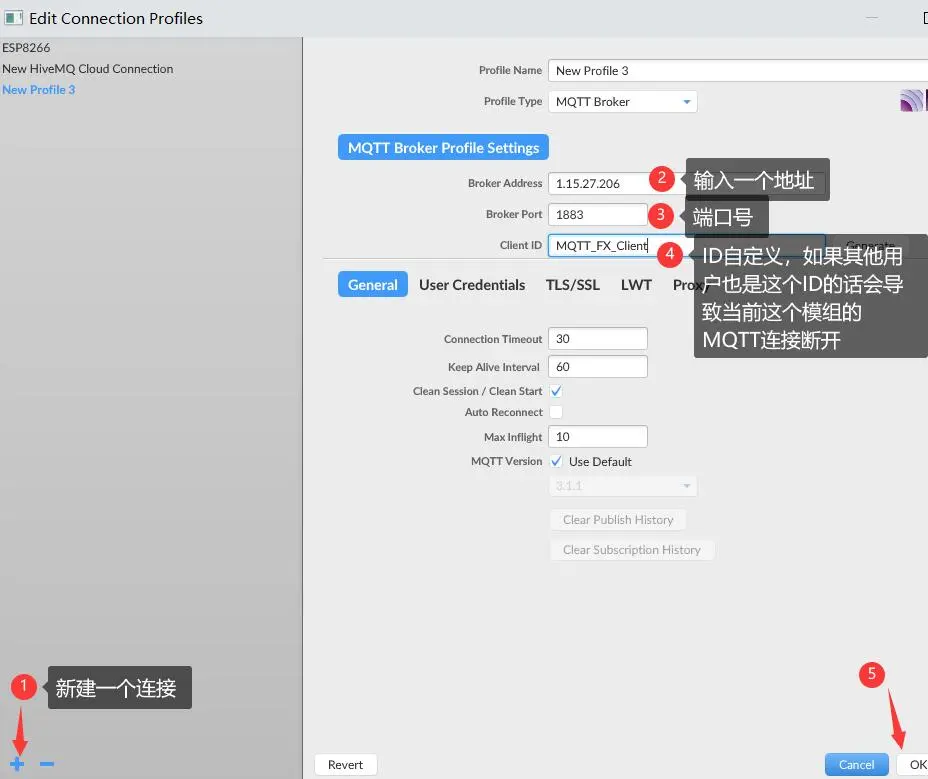
然后点击连接即可,然后订阅主题

- 使用模块连接云服务器进行发布与订阅测试
AT // 测试
# OK
AT+QSCLK=0 // 禁止模块休眠
# OK
AT+QMTOPEN=0,"1.15.27.206",1883 // 打开MQTT连接
# OK
# +QMTOPEN: 0,0
AT+QMTCONN=0,"iotdevice" // 连接服务器
# OK
# +QMTCONN: 0,0,0
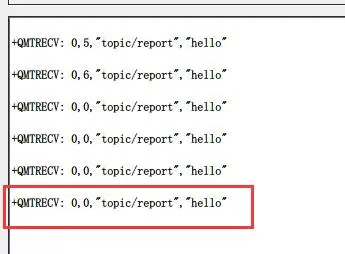
AT+QMTSUB=0,1,"topic/report",2 // 订阅了“topic/report”这个主题
# OK
# +QMTSUB: 0,1,0,2
# +QMTRECV: 0,1,"topic/report"," this that "
// 测试
AT+QMTSUB=0,1,"topic/write",2 // 订阅
# OK
# +QMTSUB: 0,1,0,2
AT+QMTUNS=0,2,"topic/write" // 退订
# OK
# +QMTUNS: 0,2,0MQTT.fx往订阅的主题发布消息,则串口助手会收到

串口助手发送消息到MQTT.fx:
AT+QMTPUB=0,0,0,0,"topic/pub",13 // 向 "topic/pub" 主题发送消息数据,数据长度为13
# >
{"value":123} // 不能有回车
# OK
# +QMTPUB: 0,0,0
上传数据到腾讯云
-
腾讯云部分跟4GCat上传数据一样步骤即可
-
MX配置
跟4G配置一样
任务调度所需定时器,1ms


- 程序编写
也是跟4G模块程序大致一样,部分不一样如下
CallBack.c
/***************************************************************************
* File: CallBack.c
* Author: Luckys.
* Date: 2023/06/19
* description: store interrupt function
****************************************************************************/
#include "AllHead.h"
/* Public variables==========================================================*/
extern uint8_t ucUart1_Rec_Buff[128];
char AT_String[255];
extern const char *TOPIC_PROPERTY_SUB;
/*
* @function: HAL_TIM_PeriodElapsedCallback
* @param: None
* @retval: None
* @brief: timer callback function
*/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if (htim->Instance == htim4.Instance) // 1ms
{
static uint8_t cat_uart_rx = 0;
static uint16_t cat_reset_cnt = 0; // 模块复位所需时间计数
cat_uart_rx++;
if (cat_uart_rx >= 50) // 串口接收回传校验
{
cat_uart_rx = 0;
bsp_NBLOT_uart.Bsp_NBLOT_Uart_Handler();
}
if (bsp_NBLOT.Reset_Status != RESET_OVER) // 复位计数
{
cat_reset_cnt++;
if (cat_reset_cnt >= BSP_NBLOT_RESET_TIME)
{
cat_reset_cnt = 0;
bsp_NBLOT.Reset_Status = RESET_OVER; // 复位完成
}
}
System.Task_Marks_Handler();
}
}
void USART2_IRQHandler(void)
{
if(__HAL_UART_GET_FLAG(&huart2,UART_FLAG_IDLE) != 0x00u)
{
bsp_NBLOT_uart.Bsp_NBLOT_Uart_Data_Parse();
__HAL_UART_CLEAR_IDLEFLAG(&huart2);
}
HAL_UART_IRQHandler(&huart2);
}
void USART1_IRQHandler(void)
{
if(__HAL_UART_GET_FLAG(&huart1,UART_FLAG_IDLE) != 0x00u)
{
__HAL_UART_CLEAR_IDLEFLAG(&huart1);
HAL_UART_DMAStop(&huart1); // 串口停止DMA接收
if (strstr((char*)ucUart1_Rec_Buff, (char*)"MQTT_DISABLE") != NULL) // 断开MQTT连接
{
bsp_NBLOT.bsp_NBLOT_Step_Status = TASK_CIOT_MQTT_DISCONN; // 断开
}
HAL_UART_Receive_DMA(&huart1, ucUart1_Rec_Buff, 128);
}
HAL_UART_IRQHandler(&huart1);
}System_Init.c
/***************************************************************************
* File: System_Init.c
* Author: Luckys.
* Date: 2023/06/23
* description:
****************************************************************************/
#include "AllHead.h"
/*====================================static function declaration area BEGIN====================================*/
static void Hardware_Init(void);
/*====================================static function declaration area END====================================*/
System_Init_t System_Init =
{
.Hardware_Init = &Hardware_Init
};
/* Public variables==========================================================*/
uint8_t ucUart1_Rec_Buff[128] = {0}; //
/*
* @function: Hardware_Init
* @param: None
* @retval: None
* @brief:
*/
static void Hardware_Init(void)
{
#if 1
__HAL_UART_ENABLE_IT(&huart1, UART_IT_IDLE); //
HAL_UART_Receive_DMA(&huart1, ucUart1_Rec_Buff, 128);
#endif
bsp_NBLOT_uart.Bsp_NBLOT_Uart_Init(); //
printf("Hello\r\n");
HAL_TIM_Base_Start_IT(&htim4);
}Task.c
/***************************************************************************
* File: Task.c
* Author: Luckys.
* Date: 2023/06/23
* description:
****************************************************************************/
#include "AllHead.h"
/* Public variables==========================================================*/
extern const char *TOPIC_PROPERTY_SUB;
/*====================================static function declaration area BEGIN====================================*/
static void TasksHandle_200MS(void);
static void TasksHandle_1S(void);
static void TasksHandle_2S(void);
/*====================================static function declaration area END====================================*/
Task_t Task[] =
{
{FALSE, 200, 200, TasksHandle_200MS}, // task Period: 200ms
{FALSE, 1000, 1000, TasksHandle_1S}, // task Period: 1s
{FALSE, 2000, 2000, TasksHandle_2S}, // task Period: 2s
};
/*====================================variable definition declaration area BEGIN===================================*/
uint8_t ucTasks_Max = sizeof(Task) / sizeof(Task[0]);
/*====================================variable definition declaration area END===================================*/
static inline void TasksHandle_200MS(void)
{
HAL_GPIO_TogglePin(LED_GPIO_Port,LED_Pin);
bsp_NBLOT.bsp_NBLOT_Running();
}
static inline void TasksHandle_1S(void)
{
bsp_NBLOT.bsp_NBLOT_Data_Upload_1();
}
static inline void TasksHandle_2S(void)
{
}bsp_NBLOT.h
#ifndef __BSP_NBLOT_H
#define __BSP_NBLOT_H
// 使用调试打印(可以打印发送与接收回传数据到上位机串口助手)
#define USE_Debug_Print 1
// 使用正常打印
#define USE_Normal_Print 1
// 模块复位完成所需时间(大概5s)
#define BSP_NBLOT_RESET_TIME (uint16_t)5000
// 等待回传的计数值(测试发现大概正常情况下收到回传是330000左右,所以需要设置比它大几倍即可)
#define BSP_NBLOT_WAIT_COUNT 2000000
// 全自动模式(断开连接后自动重新复位连接)
#define BSP_NBLOT_AUTO_CONNNECT_MODE 1
/* CAT1模块工作步骤列表 */
typedef enum
{
TASK_CIOT_AT_TEST = 0, // 【AT】测试模块是否正常
TASK_CIOT_AT_TEST_RSP,
TASK_NBIOT_DISABLE_PSM, // 【AT+QSCLK=0】禁止模块休眠
TASK_NBIOT_DISABLE_PSM_RSP,
TASK_NBIOT_DISABLE_ECHO, // 【ATE0】关闭回显
TASK_NBIOT_DISABLE_ECHO_RSP,
TASK_NBIOT_SET_BAND, // 【AT+QBAND=1,8】设置模块的工作频段 3: 中国联通 5: 中国电信 8: 中国移动
TASK_NBIOT_SET_BAND_RSP,
TASK_NBIOT_DHCP, // 【AT+CGPADDR?】读取设备IP地址
TASK_NBIOT_DHCP_RSP,
TASK_CIOT_MQTT_OPEN, // 【AT+QMTOPEN=0,[CLIENT_ID],1883】打开MQTT连接,CLIENT_ID是上面定义的那个
TASK_CIOT_MQTT_OPEN_RSP,
TASK_CIOT_MQTT_CONNECT, // 【AT+QMTCONN=0,[CLIENT_ID],[USERNAME],[PASSWORD]】连接MQTT服务器
TASK_CIOT_MQTT_CONNECT_RSP,
TASK_CONNECT_SUCCESS, // 连接MQTT服务器成功(结束)
TASK_CIOT_MQTT_DISCONN, // 【AT+CMQTTDISC=0,120】断开MQTT连接
TASK_CIOT_MQTT_DISCONN_RSP,
TASK_CIOT_RESET, // 【AT+CRESET】 模块复位
TASK_CIOT_RESET_RSP,
TASK_IDLE, // 空闲状态(空转)
} bsp_NBLOT_Mode_Steps_et;
// 返回状态枚举
typedef enum
{
RET_PASS = -1, // 成功
RET_FAIL = 0 // 失败
} bsp_NBLOT_Return_Status_et;
// 复位状态枚举
typedef enum
{
RESET_NOT = 0, // 未复位
RESET_OVER = 1, // 复位完成
} bsp_NBLOT_Reset_Status_et;
// 模块接收状态
typedef enum
{
Rec_Status_None = 0, // 不接收
Rec_Status_CheckCmd_Plan1 = 1, // 校验指令回传 --- "OK"
Rec_Status_CheckCmd_Plan2 = 2, // 校验指令回传 --- "+CGPADDR: / OK"
Rec_Status_CheckCmd_Plan3 = 3, // 校验指令回传 --- "+QMTOPEN: "
Rec_Status_CheckCmd_Plan4 = 4, // 校验指令回传 --- "+QMTCONN: "
Rec_Status_CheckCmd_Plan5 = 5, // 校验指令回传 --- ">"
Rec_Status_CheckCmd_Plan6 = 6, // 校验指令回传 --- "+QMTPUB: "
Rec_Status_MAX = Rec_Status_CheckCmd_Plan6 + 1, // 枚举成员数量(当做数组的大小)
} bsp_NBLOT_Rec_Status_et;
typedef struct
{
bsp_NBLOT_Reset_Status_et Reset_Status; // 复位状态
uint8_t bsp_NBLOT_MQTT_Connect_Flag; // 连接MQTT服务器标志位
int8_t bsp_NBLOT_Ret_Status_buf[Rec_Status_MAX]; // 存储返回值数组
bsp_NBLOT_Rec_Status_et bsp_NBLOT_Rec_Status; // 模块接收状态
int16_t bsp_NBLOT_Step_Status; // AT模块工作步骤标记状态
uint8_t bsp_NBLOT_Pub_Buf[254]; // MQTT数据上报存储数组
uint8_t bsp_NBLOT_Pub_Len; // MQTT数据上报长度
void (*bsp_NBLOT_Running)(void); // 模块运行
void (*bsp_NBLOT_Data_Upload_1)(void); // 数据上传1
} bsp_NBLOT_st;
extern bsp_NBLOT_st bsp_NBLOT;
#endifbsp_NBLOT.c
/***************************************************************************
* File: bsp_NBLOT.c
* Author: Yang
* Date: 2023/12/15
* description:
-----------------------------------
-----------------------------------
****************************************************************************/
#include "AllHead.h"
/* Private variables=========================================================*/
/* 腾讯云MQTT服务器信息 */
// 域名
static const char *DOMAIN = "J7X2YMW6IU.iotcloud.tencentdevices.com";
// 客户端ID
static const char *CLIENT_ID = "J7X2YMW6IU";
// 用户名
static const char *USERNAME = "J7X2YMW6IUTH_Sensor_Test;12010126;0M3Y7;1992171084";
// 密码
static const char *PASSWORD = "a88fc461af8202b6933524ec9b5c9d2fac226a35cbc09b9d4150a1d00000406f;hmacsha256";
// 属性发布主题
static const char *TOPIC_PROPERTY_PUB = "$thing/up/property/J7X2YMW6IU/TH_Sensor_Test";
// 模块超时计数
int16_t bsp_NBLOT_Timeout_Count;
// 模块AT指令字符串
char bsp_NNBLOT_AT_String[255];
/* Private function prototypes===============================================*/
static void bsp_NBLOT_Running(void);
static void bsp_NBLOT_Data_Upload_1(void);
static void bsp_NBLOT_Ret_Check(int8_t ret_status);
static void bsp_NBLOT_BeforeSending_Parameter_Init(bsp_NBLOT_Rec_Status_et rec_status, uint8_t* str);
static void bsp_NBLOT_Moduel_Reset(void);
static void bsp_NBLOT_Upload_Data_To_Pub(const char* pub_string, const char* pub_data_string);
/* Public variables==========================================================*/
bsp_NBLOT_st bsp_NBLOT =
{
.Reset_Status = RESET_NOT,
.bsp_NBLOT_MQTT_Connect_Flag = FALSE,
.bsp_NBLOT_Ret_Status_buf = {RET_FAIL},
.bsp_NBLOT_Rec_Status = Rec_Status_None,
.bsp_NBLOT_Step_Status = TASK_CIOT_AT_TEST,
.bsp_NBLOT_Pub_Buf = {0},
.bsp_NBLOT_Pub_Len = 0,
.bsp_NBLOT_Running = &bsp_NBLOT_Running,
.bsp_NBLOT_Data_Upload_1 = &bsp_NBLOT_Data_Upload_1
};
/*=========================================== 应用层函数 ===========================================*/
/*
* @function: bsp_NBLOT_Running
* @param: None
* @retval: None
* @brief: 模块运行
*/
static void bsp_NBLOT_Running(void)
{
// 未复位成功则退出
if (bsp_NBLOT.Reset_Status != RESET_OVER)
{
return;
}
switch (bsp_NBLOT.bsp_NBLOT_Step_Status)
{
case TASK_CIOT_AT_TEST: // 【发送AT测试是否正常】
{
/*状态复位*/
bsp_NBLOT_BeforeSending_Parameter_Init(Rec_Status_CheckCmd_Plan1, (uint8_t *)"AT\r\n");
break;
}
case TASK_CIOT_AT_TEST_RSP: // 【判断回传--- "OK"】
{
bsp_NBLOT_Ret_Check(bsp_NBLOT.bsp_NBLOT_Ret_Status_buf[Rec_Status_CheckCmd_Plan1]);
break;
}
case TASK_NBIOT_DISABLE_PSM: // 【禁止模块休眠】
{
/*状态复位*/
bsp_NBLOT_BeforeSending_Parameter_Init(Rec_Status_CheckCmd_Plan1, (uint8_t *)"AT+QSCLK=0\r\n");
break;
}
case TASK_NBIOT_DISABLE_PSM_RSP: // 【判断回传--- "OK"】
{
bsp_NBLOT_Ret_Check(bsp_NBLOT.bsp_NBLOT_Ret_Status_buf[Rec_Status_CheckCmd_Plan1]);
break;
}
case TASK_NBIOT_DISABLE_ECHO: // 【关闭回显】
{
/*状态复位*/
bsp_NBLOT_BeforeSending_Parameter_Init(Rec_Status_CheckCmd_Plan1, (uint8_t *)"ATE0\r\n");
break;
}
case TASK_NBIOT_DISABLE_ECHO_RSP: // 【判断回传--- "OK"】
{
bsp_NBLOT_Ret_Check(bsp_NBLOT.bsp_NBLOT_Ret_Status_buf[Rec_Status_CheckCmd_Plan1]);
break;
}
case TASK_NBIOT_SET_BAND: // 【设置模块的工作频段】
{
/*状态复位*/
bsp_NBLOT_BeforeSending_Parameter_Init(Rec_Status_CheckCmd_Plan1, (uint8_t *)"AT+QBAND=1,8\r\n");
break;
}
case TASK_NBIOT_SET_BAND_RSP: // 【判断回传--- "OK"】
{
bsp_NBLOT_Ret_Check(bsp_NBLOT.bsp_NBLOT_Ret_Status_buf[Rec_Status_CheckCmd_Plan1]);
break;
}
case TASK_NBIOT_DHCP: // 【读取设备IP地址】
{
/*状态复位*/
bsp_NBLOT_BeforeSending_Parameter_Init(Rec_Status_CheckCmd_Plan2, (uint8_t *)"AT+CGPADDR?\r\n");
break;
}
case TASK_NBIOT_DHCP_RSP: // 【判断回传--- "+CGPADDR: 0,"xxx.xxx.xxx.xxx""】
{
bsp_NBLOT_Ret_Check(bsp_NBLOT.bsp_NBLOT_Ret_Status_buf[Rec_Status_CheckCmd_Plan2]);
break;
}
case TASK_CIOT_MQTT_OPEN: // 【打开MQTT连接】
{
/*状态复位*/
Public.Memory_Clear((uint8_t*)bsp_NNBLOT_AT_String, strlen((char*)bsp_NNBLOT_AT_String)); // 清0
sprintf(bsp_NNBLOT_AT_String,"AT+QMTOPEN=0,\"%s\",1883\r\n",DOMAIN);
bsp_NBLOT_BeforeSending_Parameter_Init(Rec_Status_CheckCmd_Plan3, (uint8_t *)bsp_NNBLOT_AT_String);
break;
}
case TASK_CIOT_MQTT_OPEN_RSP: // 【判断回传--- "+QMTOPEN: "】
{
if (RET_PASS == bsp_NBLOT.bsp_NBLOT_Ret_Status_buf[Rec_Status_CheckCmd_Plan3])
{
bsp_NBLOT.bsp_NBLOT_Rec_Status = Rec_Status_None;
bsp_NBLOT.bsp_NBLOT_Step_Status++;
}
else
{
++bsp_NBLOT_Timeout_Count;
if (bsp_NBLOT_Timeout_Count >= 5)
{
bsp_NBLOT_Timeout_Count = 0;
// +(重发不生效)
bsp_NBLOT_Moduel_Reset(); // 复位
}
}
break;
}
case TASK_CIOT_MQTT_CONNECT: // 【连接MQTT服务器】
{
/*状态复位*/
Public.Memory_Clear((uint8_t*)bsp_NNBLOT_AT_String, strlen((char*)bsp_NNBLOT_AT_String)); // 清0
sprintf(bsp_NNBLOT_AT_String,"AT+QMTCONN=0,\"%s\",\"%s\",\"%s\"\r\n",CLIENT_ID,USERNAME,PASSWORD);
bsp_NBLOT_BeforeSending_Parameter_Init(Rec_Status_CheckCmd_Plan4, (uint8_t *)bsp_NNBLOT_AT_String);
break;
}
case TASK_CIOT_MQTT_CONNECT_RSP: // 【判断回传--- "+QMTCONN: "】
{
if (RET_PASS == bsp_NBLOT.bsp_NBLOT_Ret_Status_buf[Rec_Status_CheckCmd_Plan4])
{
bsp_NBLOT.bsp_NBLOT_Rec_Status = Rec_Status_None;
bsp_NBLOT.bsp_NBLOT_Step_Status++;
}
else
{
++bsp_NBLOT_Timeout_Count;
if (bsp_NBLOT_Timeout_Count >= 5)
{
bsp_NBLOT_Timeout_Count = 0;
// +(重发不生效)
bsp_NBLOT_Moduel_Reset(); // 复位
}
}
}
case TASK_CONNECT_SUCCESS: // 连接MQTT服务器成功
{
bsp_NBLOT.bsp_NBLOT_MQTT_Connect_Flag = TRUE;
bsp_NBLOT.bsp_NBLOT_Step_Status = TASK_IDLE;
#if USE_Normal_Print
printf("MQTT CONNECT SUCCESS\r\n");
#endif
break;
}
case TASK_IDLE: // 空闲状态
{
break;
}
case TASK_CIOT_MQTT_DISCONN: // 【断开MQTT连接】
{
bsp_NBLOT.bsp_NBLOT_MQTT_Connect_Flag = FALSE;
bsp_NBLOT_BeforeSending_Parameter_Init(Rec_Status_CheckCmd_Plan1, (uint8_t *)"AT+QMTDISC=0\r\n");
break;
}
case TASK_CIOT_MQTT_DISCONN_RSP: // 【判断回传---"OK"】
{
bsp_NBLOT_Ret_Check(bsp_NBLOT.bsp_NBLOT_Ret_Status_buf[Rec_Status_CheckCmd_Plan1]);
break;
}
default:
{
bsp_NBLOT.bsp_NBLOT_Step_Status = TASK_IDLE;
break;
}
}
}
/*
* @function: bsp_NBLOT_Data_Upload_1
* @param: None
* @retval: None
* @brief: 数据上传1
*/
static void bsp_NBLOT_Data_Upload_1(void)
{
static float a = 0,b = 0,c = 0,d = 0;
Public.Memory_Clear((uint8_t*)bsp_NBLOT.bsp_NBLOT_Pub_Buf, strlen((char*)bsp_NBLOT.bsp_NBLOT_Pub_Buf));
sprintf((char *)bsp_NBLOT.bsp_NBLOT_Pub_Buf, "{\"method\":\"report\",\"params\":{\"temp\":%.1f,\"humi\":%.1f,\"longitude\":%f,\"latitude\":%f}}", ++a, ++b, ++c, ++d);
bsp_NBLOT_Upload_Data_To_Pub(TOPIC_PROPERTY_PUB, (char*)bsp_NBLOT.bsp_NBLOT_Pub_Buf);
}
/*=========================================== 中间层函数 ===========================================*/
/*
* @function: bsp_NBLOT_Ret_Check
* @param: None
* @retval: None
* @brief: 回传结果检测
*/
static void bsp_NBLOT_Ret_Check(int8_t ret_status)
{
static uint16_t error_counter = 0;
if (RET_PASS == ret_status)
{
error_counter = 0;
bsp_NBLOT.bsp_NBLOT_Rec_Status = Rec_Status_None;
bsp_NBLOT.bsp_NBLOT_Step_Status++;
#if 0
printf("1234\r\n");
#endif
}
else
{
++bsp_NBLOT_Timeout_Count;
if (bsp_NBLOT_Timeout_Count >= 8)
{
error_counter++;
bsp_NBLOT.bsp_NBLOT_Step_Status--;
}
}
if (error_counter >= 10)
{
bsp_NBLOT_Moduel_Reset(); // 复位
}
}
/*
* @function: bsp_NBLOT_BeforeSending_Parameter_Init
* @param: None
* @retval: None
* @brief: 参数初始化且发送
*/
static void bsp_NBLOT_BeforeSending_Parameter_Init(bsp_NBLOT_Rec_Status_et rec_status, uint8_t* str)
{
/*状态复位*/
bsp_NBLOT.bsp_NBLOT_Rec_Status = rec_status;
bsp_NBLOT.bsp_NBLOT_Ret_Status_buf[rec_status] = RET_FAIL;
bsp_NBLOT_Timeout_Count = 0;
bsp_NBLOT_uart.Bsp_NBLOT_Uart_Send_String((uint8_t *)str);
bsp_NBLOT.bsp_NBLOT_Step_Status++;
}
/*
* @function: bsp_NBLOT_Moduel_Reset
* @param: None
* @retval: None
* @brief: 模块复位
*/
static void bsp_NBLOT_Moduel_Reset(void)
{
bsp_NBLOT.bsp_NBLOT_MQTT_Connect_Flag = FALSE; // 标志位置0
bsp_NBLOT.Reset_Status = RESET_NOT; // 未复位
bsp_NBLOT_uart.Bsp_NBLOT_Uart_Send_String((uint8_t *)"AT+QRST=1\r\n");
#if BSP_NBLOT_AUTO_CONNNECT_MODE
bsp_NBLOT.bsp_NBLOT_Step_Status = TASK_CIOT_AT_TEST; // AT模式
#endif
#if USE_Normal_Print
printf("RESET...\r\n");
#endif
}
/*
* @function: bsp_NBLOT_Upload_Data_To_Pub
* @param: pub_string -> 发送到的目的地主题 pub_data_string -> 要上传到主题的数据内容
* @retval: None
* @brief: 上传数据到MQTT主题
*/
static void bsp_NBLOT_Upload_Data_To_Pub(const char* pub_string, const char* pub_data_string)
{
uint8_t step = 0; // 运行到哪步计数
uint32_t timeout = 0; // 重发超时时间计数
static uint16_t error_count = 0; // 错误计数(复位)
if (bsp_NBLOT.bsp_NBLOT_MQTT_Connect_Flag)
{
switch (step)
{
case 0: // // 向 "xxx" 主题发送消息数据,数据长度为xx
{
timeout = 0;
bsp_NBLOT.bsp_NBLOT_Rec_Status = Rec_Status_CheckCmd_Plan5;
bsp_NBLOT.bsp_NBLOT_Ret_Status_buf[Rec_Status_CheckCmd_Plan5] = RET_FAIL;
Public.Memory_Clear((uint8_t*)bsp_NNBLOT_AT_String, strlen((char*)bsp_NNBLOT_AT_String)); // 清0
// 设置待发布的主题和要发送的数据长度
sprintf(bsp_NNBLOT_AT_String, "AT+QMTPUB=0,0,0,0,\"%s\",%d\r\n", pub_string, strlen(pub_data_string));
bsp_NBLOT_uart.Bsp_NBLOT_Uart_Send_String((uint8_t *)bsp_NNBLOT_AT_String);
step++;
}
case 1: // 判断回传 ">" 发送数据
{
// 超时等待
while (1)
{
if (RET_PASS == bsp_NBLOT.bsp_NBLOT_Ret_Status_buf[Rec_Status_CheckCmd_Plan5])
{
// 发送数据
#if 0
printf("-----%d------\r\n",timeout);
#endif
error_count = 0;
timeout = 0;
bsp_NBLOT.bsp_NBLOT_Rec_Status = Rec_Status_CheckCmd_Plan6;
bsp_NBLOT.bsp_NBLOT_Ret_Status_buf[Rec_Status_CheckCmd_Plan6] = RET_FAIL;
bsp_NBLOT_uart.Bsp_NBLOT_Uart_Send_String((const uint8_t *)pub_data_string);
step++;
break; // 退出循环
}
timeout++;
if (timeout >= BSP_NBLOT_WAIT_COUNT)
{
error_count++;
goto error_handling;
}
}
}
case 2: //判断回传 "OK"/"+QMTPUB: 0,0,0"
{
// 超时等待
while (1)
{
if (RET_PASS == bsp_NBLOT.bsp_NBLOT_Ret_Status_buf[Rec_Status_CheckCmd_Plan6])
{
error_count = 0;
timeout = 0;
bsp_NBLOT.bsp_NBLOT_Rec_Status = Rec_Status_None;
bsp_NBLOT.bsp_NBLOT_Ret_Status_buf[Rec_Status_None] = RET_FAIL;
step++;
break; // 退出循环
}
timeout++;
if (timeout >= BSP_NBLOT_WAIT_COUNT)
{
error_count++;
goto error_handling;
}
}
}
default:
break;
}
}
// 错误处理
error_handling:
{
if (error_count >= 10) // 长时间发送失败
{
error_count = 0;
bsp_NBLOT.bsp_NBLOT_Step_Status = TASK_CIOT_MQTT_DISCONN; // 断开
}
return;
}
}bsp_NBLOT_uart.h
#ifndef __BSP_NBLOT_UART_H
#define __BSP_NBLOT_UART_H
#include "AllHead.h"
// 模块使用的串口
#define BSP_NBLOT_USE_Serial huart2
// 串口接收最大长度
#define BSP_NBLOT_Rec_MAX_LEN 168
typedef struct
{
uint8_t ucUart_Rec_Over_Flag; // 串口接收完成标志位
uint16_t usUart_Rec_Len; // 串口接收数据长度
uint8_t *pucRec_Buffer; // 接收缓存指针
void (*Bsp_NBLOT_Uart_Init)(void); // 串口初始化
void (*Bsp_NBLOT_Uart_Send_String)(const uint8_t *); // 串口发送字符串
void (*Bsp_NBLOT_Uart_Data_Parse)(void); // 串口数据解析
void (*Bsp_NBLOT_Uart_Handler)(void); // 串口处理函数
} bsp_NBLOT_uart_st;
extern bsp_NBLOT_uart_st bsp_NBLOT_uart;
#endifbsp_NBLOT_uart.c
/***************************************************************************
* File: bsp_NBLOT_uart.c
* Author: Yang
* Date: 2023/12/06
* description:
-----------------------------------
串口接线:
PA2(TX) --- 模块RX
PA3(RX) --- 模块TX
GND --- GND
3.3V --- 3.3V
-----------------------------------
****************************************************************************/
#include "AllHead.h"
/* Private variables=========================================================*/
static uint8_t NBLOT_Uart_Rec_Temp_Arr[BSP_NBLOT_Rec_MAX_LEN]; // 串口接收临时缓存数组
static uint8_t NBLOT_Uart_Rec_Arr[BSP_NBLOT_Rec_MAX_LEN]; // 模块串口接收数组
/* Private function prototypes===============================================*/
static void Bsp_NBLOT_Uart_Init(void);
static void Bsp_NBLOT_Uart_Send_String(const uint8_t *pStr);
static void Bsp_NBLOT_Uart_Data_Parse(void);
static void Bsp_NBLOT_Uart_Handler(void);
/* Public variables==========================================================*/
bsp_NBLOT_uart_st bsp_NBLOT_uart =
{
.ucUart_Rec_Over_Flag = FALSE,
.usUart_Rec_Len = 0,
.pucRec_Buffer = NBLOT_Uart_Rec_Arr,
.Bsp_NBLOT_Uart_Init = &Bsp_NBLOT_Uart_Init,
.Bsp_NBLOT_Uart_Send_String = &Bsp_NBLOT_Uart_Send_String,
.Bsp_NBLOT_Uart_Data_Parse = &Bsp_NBLOT_Uart_Data_Parse,
.Bsp_NBLOT_Uart_Handler = &Bsp_NBLOT_Uart_Handler
};
/*
* @function: Bsp_NBLOT_Uart_Init
* @param: None
* @retval: None
* @brief: 串口初始化
*/
static void Bsp_NBLOT_Uart_Init(void)
{
__HAL_UART_ENABLE_IT(&BSP_NBLOT_USE_Serial, UART_IT_IDLE); // 使能串口空闲中断
HAL_UART_Receive_DMA(&BSP_NBLOT_USE_Serial, NBLOT_Uart_Rec_Temp_Arr, (uint16_t)BSP_NBLOT_Rec_MAX_LEN); // 接收清0
}
/*
* @function: Bsp_NBLOT_Uart_Send_String
* @param: None
* @retval: None
* @brief: 串口发送字符串
*/
static void Bsp_NBLOT_Uart_Send_String(const uint8_t *pStr)
{
HAL_UART_Transmit(&BSP_NBLOT_USE_Serial, pStr, strlen((const char *)pStr), 5000);
#if USE_Debug_Print
HAL_UART_Transmit(&huart1, pStr, strlen((const char *)pStr), 5000);
#endif
}
/*
* @function: Bsp_NBLOT_Uart_Data_Parse
* @param: None
* @retval: None
* @brief: 串口接收数据解析
*/
static void Bsp_NBLOT_Uart_Data_Parse(void)
{
HAL_UART_DMAStop(&BSP_NBLOT_USE_Serial); // 串口停止DMA接收
bsp_NBLOT_uart.usUart_Rec_Len = BSP_NBLOT_Rec_MAX_LEN - __HAL_DMA_GET_COUNTER(&hdma_usart2_rx);
Public.Memory_Copy((char*)bsp_NBLOT_uart.pucRec_Buffer, (char*)NBLOT_Uart_Rec_Temp_Arr, bsp_NBLOT_uart.usUart_Rec_Len);
bsp_NBLOT_uart.ucUart_Rec_Over_Flag = TRUE;
}
/*
* @function: Bsp_NBLOT_Uart_Handler
* @param: None
* @retval: None
* @brief: 串口接收处理函数
*/
static void Bsp_NBLOT_Uart_Handler(void)
{
if (bsp_NBLOT_uart.ucUart_Rec_Over_Flag)
{
switch (bsp_NBLOT.bsp_NBLOT_Rec_Status)
{
case Rec_Status_None:
{
break;
}
case Rec_Status_CheckCmd_Plan1:
{
if (strstr((char*)bsp_NBLOT_uart.pucRec_Buffer, (char*)"OK") != NULL)
{
bsp_NBLOT.bsp_NBLOT_Ret_Status_buf[Rec_Status_CheckCmd_Plan1] = RET_PASS;
}
else
{
bsp_NBLOT.bsp_NBLOT_Ret_Status_buf[Rec_Status_CheckCmd_Plan1] = RET_FAIL;
}
break;
}
case Rec_Status_CheckCmd_Plan2:
{
if (strstr((char*)bsp_NBLOT_uart.pucRec_Buffer, (char*)"OK") != NULL) // 寻找子串"OK"
{
char *start = strstr((char*)bsp_NBLOT_uart.pucRec_Buffer, (char*)"+CGPADDR: "); // 寻找子串"+CGPADDR: "
if (NULL == start)
{
bsp_NBLOT.bsp_NBLOT_Ret_Status_buf[Rec_Status_CheckCmd_Plan2] = RET_FAIL;
}
else
{
char *ip = start + 13; // 获取 IP 地址的起始位置
char *end = strchr(ip, '"'); // 获取 IP 地址的结束位置
if (NULL == end)
{
bsp_NBLOT.bsp_NBLOT_Ret_Status_buf[Rec_Status_CheckCmd_Plan2] = RET_FAIL;
}
else
{
*end = 0; // 在 IP 地址的结束位置处添加 '\0' 字符,表示字符串的结束
if (strlen(ip) < 7) // 如果 IP 地址的长度小于 7
{
bsp_NBLOT.bsp_NBLOT_Ret_Status_buf[Rec_Status_CheckCmd_Plan2] = RET_FAIL;
}
else
{
bsp_NBLOT.bsp_NBLOT_Ret_Status_buf[Rec_Status_CheckCmd_Plan2] = RET_PASS;
}
}
}
}
else
{
bsp_NBLOT.bsp_NBLOT_Ret_Status_buf[Rec_Status_CheckCmd_Plan2] = RET_FAIL;
}
break;
}
case Rec_Status_CheckCmd_Plan3:
{
if (strstr((char*)bsp_NBLOT_uart.pucRec_Buffer, (char*)"+QMTOPEN: ") != NULL)
{
bsp_NBLOT.bsp_NBLOT_Ret_Status_buf[Rec_Status_CheckCmd_Plan3] = RET_PASS;
}
else
{
bsp_NBLOT.bsp_NBLOT_Ret_Status_buf[Rec_Status_CheckCmd_Plan3] = RET_FAIL;
}
break;
}
case Rec_Status_CheckCmd_Plan4:
{
if (strstr((char*)bsp_NBLOT_uart.pucRec_Buffer, (char*)"+QMTCONN: ") != NULL)
{
bsp_NBLOT.bsp_NBLOT_Ret_Status_buf[Rec_Status_CheckCmd_Plan4] = RET_PASS;
}
else
{
bsp_NBLOT.bsp_NBLOT_Ret_Status_buf[Rec_Status_CheckCmd_Plan4] = RET_FAIL;
}
break;
}
case Rec_Status_CheckCmd_Plan5:
{
if (strstr((char*)bsp_NBLOT_uart.pucRec_Buffer, (char*)">") != NULL)
{
bsp_NBLOT.bsp_NBLOT_Ret_Status_buf[Rec_Status_CheckCmd_Plan5] = RET_PASS;
}
else
{
bsp_NBLOT.bsp_NBLOT_Ret_Status_buf[Rec_Status_CheckCmd_Plan5] = RET_FAIL;
}
break;
}
case Rec_Status_CheckCmd_Plan6:
{
if (strstr((char*)bsp_NBLOT_uart.pucRec_Buffer, (char*)"+QMTPUB: ") != NULL)
{
bsp_NBLOT.bsp_NBLOT_Ret_Status_buf[Rec_Status_CheckCmd_Plan6] = RET_PASS;
}
else
{
bsp_NBLOT.bsp_NBLOT_Ret_Status_buf[Rec_Status_CheckCmd_Plan6] = RET_FAIL;
}
break;
}
default:break;
}
bsp_NBLOT_uart.ucUart_Rec_Over_Flag = FALSE;
#if USE_Debug_Print
printf("%s\r\n",bsp_NBLOT_uart.pucRec_Buffer);
#endif
Public.Memory_Clear(bsp_NBLOT_uart.pucRec_Buffer,bsp_NBLOT_uart.usUart_Rec_Len);
bsp_NBLOT_uart.usUart_Rec_Len = 0;
HAL_UART_Receive_DMA(&BSP_NBLOT_USE_Serial, NBLOT_Uart_Rec_Temp_Arr, (uint16_t)BSP_NBLOT_Rec_MAX_LEN);
}
}- 实验现象